
Physiklabor
Hinweise für
die Anfertigung der Versuchsberichte
Bestimmung
von
Messwert
und Unsicherheit
nach
DIN 1319-3
von
Ulrich Schrewe
WS 2002/03
Inhalt:
1. Vorbemerkungen
2. Bestimmung einzelner Messgrößen
2.1 Mittelwert, Standardabweichung,
Standardunsicherheit
2.2 Anwendung der Definitionen am Beispiel
Längenmessung
2.3 Darstellung der Messwertverteilung
2.4 Relative Unsicherheit, erweiterte
Unsicherheit, Vertrauensbereich
2.5 Das vollständig Messergebnis
2.6 Systematische
Unsicherheiten
3. Auswerteverfahren bei mehreren Eingangsgrößen
3.1 Korrelationen
3.2 Allgemeines verfahren
3.3 Verfahren bei unkorrelierten
Eingangsgrößen
3.4 Regel zur Vereinfachung der
Unsicherheitsermittlung
3.5 Anwendungsbeispiele
4. Zusammenfassung
1. Vorbemerkungen
Bei der Anfertigung der
Versuchsberichte sind einschlägige Normen und Richtlinien (z. B. DIN) zu
beachten. Wichtig ist die DIN 1319: "Grundlagen der Messtechnik", insbesondere der Teil 3:
"Auswertung
von Messungen einer einzelnen Messgröße; Messunsicherheit". Die
Neufassung des Jahres 1996, die eine ältere Version aus dem Jahr 1983 ersetzt,
basiert auf Empfehlungen des "Guide to the Expression of Uncertainty in
Measurements", abgekürzt "GUM",
der "ISO International Organization
for Standardization" aus dem Jahr 1993. Gegenüber früheren
Darstellungen (die z. B. auch noch in Lehrbüchern zu finden sind), wird im GUM eine etwas geänderte Terminologie und Philosophie zur der Ermittlung von Messunsicherheiten empfohlen.
Dies bedeutet keineswegs, dass alle mathematischen Beziehungen in älteren
Anleitungen "überholt" sind. Bei der Erstellung neuer
Versuchprotokolle ist es aber empfehlenswert, von Anfang an den aktuellen DIN
und GUM Richtlinien zu folgen.
Neue Terminologie: Die ältere Literatur verwendete Begriffe wie Messfehler, Fehlerrechnung, Fehlerfortpflanzung, usw. Im
Zusammenhang mit Messvorgängen ist der Begriff Fehler jedoch problematisch, denn das
allgemeine Sprachverständnis assoziiert mit dem Begriff Fehler, dass etwas falsch
ist. Das Abweichen eines Messergebnisses vom wahren Wert einer Messgröße, bedeutet aber nicht, dass die Messung falsch
war. Sie wird vielmehr durch die Tatsache verursacht, dass jeder Messvorgang
mit einer gewissen Unsicherheit behaftet ist. In Anlehnung an die
englischen Begriffe "error" und "uncertainty" verwendet man
neuerdings die entsprechenden deutschen Begriffe "Fehler" und "Unsicherheit". Fehler sollte dann verwendet werden, wenn bei
einer Messung etwas tatsächlich falsch gemacht worden ist (z. B. wenn bei einer
Längenmessung ein ungeeigneter Maßstab verwendet wurde, oder wenn bei der
Messung einer elektrischen Größe eine falsche Messgeräteeinstellung gewählt
wurde.) Normale nicht-falsche
Messungen besitzen immer eine gewisse Unsicherheit, die bei
mehreren Einzelmessungen zu einer Streuung der Messdaten führt. Das Messergebnis
sollte immer zusammen mit einer Unsicherheit angegeben werden, um die Qualität
eines Messverfahrens zu charakterisieren. In der DIN 1319-3 wird die Standard(mess)unsicherheit
definiert, die als ein "Kennwert" der Messung angesehen, und als quantitatives
Maß für die Unkenntnis der Messgröße angesehen werden kann. Sie
kennzeichnet einen Bereich, den man "vernünftigerweise dem wahren Wert
der Messgröße als Schätzwert zuweisen kann" (Beachten Sie die sehr
allgemeine Definition und die Bezeichnung "Kennwert". Das Messergebnis und die Standard(mess)unsicherheit
definieren zwar einen Wertebereich, der für den wahren Wert kennzeichnend ist, aber dieser Bereich hat eine
andere Bedeutung als die Vertrauensbereiche, die den wahren
Wert mit einer gewissen vorgegebenen Wahrscheinlichkeit, dem Vertrauensniveau, enthalten.) Nach DIN
1319-3 kann man alternativ zur Standard(mess)unsicherheit eine erweiterte
Messunsicherheit angeben. In diesem Fall ist aber zwingend
gefordert, dass der gewählte Erweiterungsfaktor zusammen mit dem Ergebnis
angegeben wird. Zusätzlich (nicht alternativ!) zur Standard(mess)unsicherheit oder erweiterten
Messunsicherheit kann ein Vertrauensbereich angegeben werden. Diese Angabe
ist besonders bei technischen Mess- oder Kontrollvorgängen sinnvoll. Bei der
Bestimmung von physikalischen Größen und Stoffkonstanten aber entbehrlich.
Falls eine Angabe zum Vertrauensbereiches gemacht wird, muss in jedem
Fall auch das zugehörige Vertrauensniveau mitgeteilt werden.
Ein vollständiges Messergebnis besteht immer
aus:
Messwert und (Standard- oder erweiterte ) Messunsicherheit.
Als zusätzlich Angaben sind möglich:
Vertrauensbereich zusammen mit Vertrauensniveau
Messunsicherheiten müssen
deutlich von Messabweichungen
unterschieden werden. Eine Abweichung
bezeichnet die Differenz zweier Werte, z. B die Differenz zwischen den Einzelmessungen
und dem Ergebnis einer Messreihe, dem Messwert, oder
zwischen dem Messwert
und dem wahren
Wert der Messgröße (den man ja oft gar nicht kennt). Messunsicherheiten
beschreiben aber nicht, wie weit der Messwert vom wahren Wert abweicht, vielmehr kann man (beim Vorliegen bestimmter
Voraussetzungen) mit Hilfe der Messunsicherheit eine Wahrscheinlichkeit für das
Vorhandensein einer Abweichung zwischen Messwert und wahrem Wert ableiten.
Die Begriffe Fehler und
Abweichung
sollten nicht dann verwendet werden, wenn eigentlich eine Messunsicherheit gemeint ist.
(Beispiele: Nicht Messfehler,
sondern Messunsicherheit,
nicht Standardfehler
sondern Standardmessunsicherheit.)
(Zusatz:
Bei der Durchsicht einer großen Zahl von Versuchsprotokollen zeigte sich, dass
ca. 50% der Studenten statt "Standard-" die Schreibweise
"Standart-" bevorzugen. Trotz dieses respektablen Abstimmungsergebnisses
ist nicht das "t", sondern ein "d"
Rechtschreibungsstandard.)
2. Bestimmung einzelner
Messgrößen
2.1 Mittelwert,
Standardabweichung, Standardunsicherheit
Das Auswerteverfahren für eine
einzelne Messgröße und die in der neuen DIN Norm verwendeten Begriffe (gelb
unterlegt) sollen am Beispiel
einer Längenmessung (Beispiel A.1: der DIN 1319-3) erläutert werden:
Ein Endmaß mit einer
Länge von 150,000 mm soll mit einem Längenmessgerät geprüft werden. Die physikalische Größe Y, der die Messung gilt, genannt Messgröße (Ergebnisgröße) ist die Länge L,
Y = L. Als wahren Wert der
Endmaßlänge betrachte man den angegeben Wert: Y = L = 150,000 mm. Das Ziel jeder Messung
ist es, ein Ergebnis zu gewinnen, das dem wahren
Wert Y der Messgröße möglichst nahe kommt. Man verwendet Messgeräte, auch Messeinrichtungen
genannt, die auf einem bestimmten Messverfahren
basieren, das auf das Meßobjekt (hier: das
Endmaß) angewendet wird.
Im vorliegenden Beispiel soll das
Längenmessgerät sorgfältig kalibriert sein und in dem relevanten Messbereich
eine bekannte systematische Messabweichung von X2 = - 0,06 mm besitzen. Zur
Vereinfachung soll zunächst die systematische Unsicherheit von X2 vernachlässigt werden. Die
gesuchte physikalische Größe Y ergibt sich dann durch Y = X1 – X2,
wobei die Eingangsgröße X1 die Größe bezeichnet, die sich zunächst bei
der Messdatenauswertung ergibt. Die Größe K = - X2 nennt man Korrektion und es gilt: Y = X1 + K (Ergebnisgröße ist gleich Eingangsgröße plus Korrektion).
Im Beispiel beträgt die Korrektion
des Längenmessgerätes K = + 0,06 mm.
Messgeräte, besonders in der Präzisionsmesstechnik, sind manchmal mit Korrektionstabellen ausgestattet.
Die geschilderte Vorüberlegung
bezüglich der Notwendigkeit einer Korrektion
bezeichnet man nach der Terminologie des GUM und der DIN 1319-3 als die "Aufstellung des Modells" zur Bestimmung einer einfachen
Messgröße.
(Bei den Messgeräten im Physiklabor
ist normalerweise keine Korrektion erforderlich.)
Anmerkungen zum Messverfahren:
Bei einer Längenmessung könnten als Messverfahren zum Beispiel 1. ein einfacher Maßstab, 2. ein Messschieber, 3. eine Präzisionsmessuhr oder 4. ein optisches Laserinterferometer verwendet werden. Die genannten Verfahren sind qualitativ sehr unterschiedlich. Deshalb werden sie wahrscheinlich unterschiedliche Messwerte liefern, wobei nicht ausgeschlossen ist, dass sich zufällig auch gleiche Zahlenwerte ergeben können. Die Streuung der Messdaten (und damit die Messunsicherheit) wird in den Beispielen 1 – 4 aber sehr unterschiedlich sein.
Eine Einzelmessung
allein wird im allgemeinen nicht die Messgröße
Y ergeben. Vielmehr treten unvermeidbar Messabweichungen
zwischen dem Ergebnis einer Einzelmessung vj
und dem wahren Wert der Messgröße Y auf. Man bestimmt
deshalb aus den Einzelmessungen vj einer Messung einen Schätzwert y,
wobei y dann als Näherung für die Messgröße Y angesehen wird, ![]() . Man geht dabei davon aus, dass Einzelmessungen bedingt durch rein zufällige Einflüsse um den wahren
Wert der Messgröße streuen. Verallgemeinernd betrachtet man Messwerte als Realisierung einer Zufallsgröße V,
die dann der Eingangsgröße X1 zugeordnet wird. Die
Verteilung der Zufallsgröße folgt einer Wahrscheinlichkeitsverteilung,
die a priori nicht bekannt ist und die im Prinzip durch eine (unendlich) große
Zahl von Messungen bestimmt werden müsste.
. Man geht dabei davon aus, dass Einzelmessungen bedingt durch rein zufällige Einflüsse um den wahren
Wert der Messgröße streuen. Verallgemeinernd betrachtet man Messwerte als Realisierung einer Zufallsgröße V,
die dann der Eingangsgröße X1 zugeordnet wird. Die
Verteilung der Zufallsgröße folgt einer Wahrscheinlichkeitsverteilung,
die a priori nicht bekannt ist und die im Prinzip durch eine (unendlich) große
Zahl von Messungen bestimmt werden müsste.
Tabelle 1: Die Einzelmesswerte
der Längenmessung (Beispiel A.1 der DIN 1319-3) sowie Zwischenwerte für weitere
Berechnungen sind in der folgenden Tabelle zusammengestellt.
|
Messung Nr. j |
Länge vj mm |
(vj - vm) mm |
(vj - vm)2
mm2 |
vj2 mm2 |
|
1 |
150,14 |
0,12 |
0,0144 |
22542,02 |
|
2 |
150,04 |
0,02 |
0,0004 |
22512,00 |
|
3 |
149,97 |
-0,05 |
0,0025 |
22491,00 |
|
4 |
150,08 |
0,06 |
0,0036 |
22524,01 |
|
5 |
149,93 |
-0,09 |
0,0081 |
22479,00 |
|
6 |
149,99 |
-0,03 |
0,0009 |
22497,00 |
|
7 |
150,13 |
0,11 |
0,0121 |
22539,02 |
|
8 |
150,09 |
0,07 |
0,0049 |
22527,01 |
|
9 |
149,89 |
-0,13 |
0,0169 |
22467,01 |
|
10 |
150,01 |
-0,01 |
0,0001 |
22503,00 |
|
11 |
149,99 |
-0,03 |
0,0009 |
22497,00 |
|
12 |
150,04 |
0,02 |
0,0004 |
22512,00 |
|
13 |
150,02 |
0,00 |
0,0000 |
22506,00 |
|
14 |
149,94 |
-0,08 |
0,0064 |
22482,00 |
|
15 |
150,19 |
0,17 |
0,0289 |
22557,04 |
|
16 |
149,93 |
-0,09 |
0,0081 |
22479,00 |
|
17 |
150,09 |
0,07 |
0,0049 |
22527,01 |
|
18 |
149,83 |
-0,19 |
0,0361 |
22449,03 |
|
19 |
150,03 |
0,01 |
0,0001 |
22509,00 |
|
20 |
150,07 |
0,05 |
0,0025 |
22521,00 |
|
|
|
|
|
|
|
Summen: |
3000,40 |
0,00 |
0,1522 |
450120,16 |
|
Mittelwert vm: |
150,02 |
|
|
|
In DIN 1319-3 werden Empfehlungen
für das praktische Vorgehen bei einer begrenzten Anzahl von Messungen gegeben:
Aus einer Reihe von Einzelmessungen vj (j = 1,2,3,......n)
wird zunächst der Schätzwert x1 der Eingangsgröße Xi
und eine Messunsicherheit u(x1) bestimmt. Die Einzelmessungen vj
sollen zufällig um die Messgröße Y streuen. Sehr oft kann die Häufigkeitsverteilung der Einzelmessungen
durch eine Normalverteilung nach Gauß beschrieben werden.
Nach der Wahrscheinlichkeitstheorie erhält man Gauß-Verteilungen bei rein
zufälligen Abweichungen zwischen Einzelmessung und Erwartungswert.
Nach den statistischen Gesetzen ist
bei einer unendlichen Anzahl von Einzelmessungen vj ist der Erwartungswert m einer
Wahrscheinlichkeitsverteilung der Grenzwert n ® ¥ des arithmetischen Mittels:
 (1)
(1)
Bei einer endlichen Anzahl
von Messungen verwendet man den arithmetischen Mittelwert
als Schätzwert für m und definiert
ihn deshalb auch als Schätzwert x1 der Eingangsgröße X1:
![]() (2)
(2)
Die Standardabweichung
s (bzw. die Varianz s2, das
Quadrat der Standardabweichung) wird bei einer unendlichen Anzahl von
Messungen in folgender Form definiert:
 (3)
(3)
Bei einer endlichen Anzahl
von Messungen ist aber nicht der Erwartungswert
m sondern nur dessen Schätzwert ![]() bekannt. Dies
führt zur Definition einer (empirischen) Standardabweichung s
in der Form:
bekannt. Dies
führt zur Definition einer (empirischen) Standardabweichung s
in der Form:
 (4)
(4)
Hinweis: Die beiden Ausdrücke in Gleichung (4) sind identisch. Der
erste ist zweckmäßig, wenn ![]() bereits bekannt ist
und anschließend s berechnet werden
soll. Der zweite Ausdruck ist
vorteilhaft, wenn man die Berechnung von
bereits bekannt ist
und anschließend s berechnet werden
soll. Der zweite Ausdruck ist
vorteilhaft, wenn man die Berechnung von ![]() und s mit einem Rechner ausführt möchte, und
direkt bei der Eingabe von vj
die Summe der Messwerte SM
und die Summe der Quadrate der Messwerte SQ
addieren kann. Es erspart eine doppelte Eingabe der Messwerte.
und s mit einem Rechner ausführt möchte, und
direkt bei der Eingabe von vj
die Summe der Messwerte SM
und die Summe der Quadrate der Messwerte SQ
addieren kann. Es erspart eine doppelte Eingabe der Messwerte.
Bestätigung für die Identität der Ausdrücke in Gleichung (4):
 (5)
(5)
Mit ![]() und
und ![]() ergibt sich:
ergibt sich: ![]() und
und ![]() (6)
(6)
Die (empirische) Standardabweichung s charakterisiert die Abweichung,
die Einzelmessungen vom Schätzwert ![]() haben können. Da
jede endliche Menge von Messwerten aber nur die Realisierungen einer
Zufallsgröße darstellt (eine zweite unabhängige Messung liefert sicher andere
Messwerte) kann auch
haben können. Da
jede endliche Menge von Messwerten aber nur die Realisierungen einer
Zufallsgröße darstellt (eine zweite unabhängige Messung liefert sicher andere
Messwerte) kann auch ![]() vom Erwartungswert m und die empirische Standardabweichung s von der Standardabweichung s der Wahrscheinlichkeitsverteilung
abweichen.
vom Erwartungswert m und die empirische Standardabweichung s von der Standardabweichung s der Wahrscheinlichkeitsverteilung
abweichen.
Die Standard(mess)unsicherheit
u(x1) ist definiert
als die (empirische) Standardabweichung des Mittelwertes
![]() :
:
 (7)
(7)
2.2 Anwendung der Definitionen am Beispiel
Längenmessung
2.2.1 Schätzwert x1 der
Eingangsgröße X1 als Mittelwert der Messwerte![]() :
:
![]() (8)
(8)
2.2.2 (Empirische)
Standardabweichung s der Messwerte:
 (9)
(9)
(Empirische) Standardabweichung alternativ:
 (10)
(10)
(Der
Unterschied in der letzten Stelle beruht auf Rundungsfehlern.)
2.2.3 Standard(mess)unsicherheit u(x1)
des Schätzwertes:
![]() (11)
(11)
Hinweis: Bei der Verwendung von EXCEL stehen für die Berechnung
von ![]() und s die Funktionen
"MITTELWERT" und "STABW" zur Verfügung. Um u(x1)
zu berechnen, muss der mit der STABW-Funktion berechnete Werte durch
und s die Funktionen
"MITTELWERT" und "STABW" zur Verfügung. Um u(x1)
zu berechnen, muss der mit der STABW-Funktion berechnete Werte durch ![]() dividiert werden.
dividiert werden.
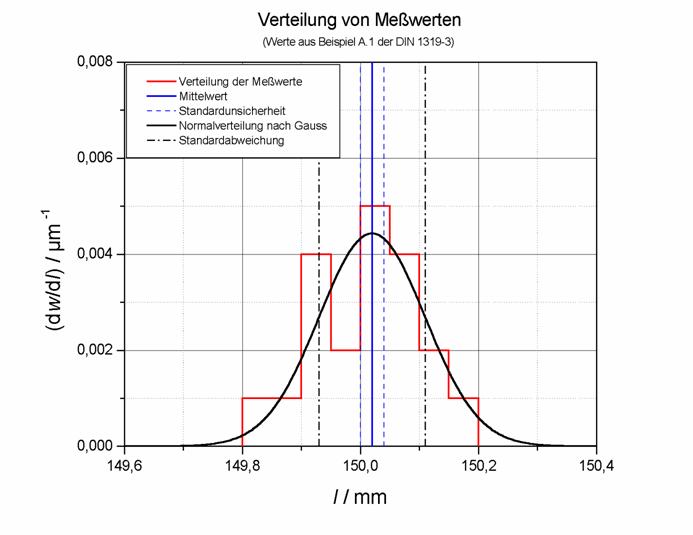
2.3 Darstellung
der Messwertverteilung
In der Figur 1 wurden die
Häufigkeitsverteilung der Messwerte aus Tabelle 1 und die
Gaußsche-Normalverteilung graphisch aufgetragen, wobei entsprechend üblicher
Konvention, das Integral der Verteilungen auf 1 normiert wurde.
Zur Erläuterung: Die rote Treppenkurve zeigt die Wahrscheinlichkeit ![]() pro Längenintervall
mit einem
pro Längenintervall
mit einem ![]() . Die Werte
. Die Werte ![]() wurden über einen
Bereich von
wurden über einen
Bereich von ![]() gemittelt.
gemittelt.
Die schwarze glatte Kurve zeigt zum
Vergleich die Normalverteilung nach Gauß,
wobei der Erwartungswert m durch den Mittelwert der Messwerte ![]() und die Standardabweichung
s durch die empirische
Standardabweichung
und die Standardabweichung
s durch die empirische
Standardabweichung ![]() ersetzt wurden:
ersetzt wurden:
 (12)
(12)
Man erkennt, dass die
experimentelle Verteilung recht gut durch die Gaußsche-Normalverteilung
beschrieben wird.








 . Die u(D*) und u(J) sind die Standard(mess)unsicherheiten
der Eingangsgrößen.
. Die u(D*) und u(J) sind die Standard(mess)unsicherheiten
der Eingangsgrößen. 





 . Mit Regel 4 und Regel 5 folgt:
. Mit Regel 4 und Regel 5 folgt: . Man ersetze zunächst den Nenner durch
. Man ersetze zunächst den Nenner durch 
